Learning from Demonstrations with Koopman Operators for Robotics
We learn dynamical systems from demonstrations for robot motion planning with the Koopman operator.
•
1 min read
We learn dynamical systems from demonstrations for robot motion planning with the Koopman operator.
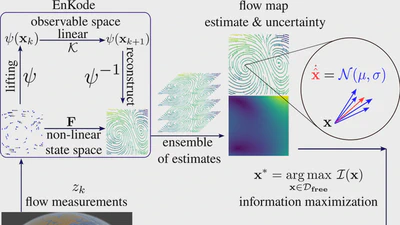
We present EnKode, an active learning framework based on Koopman operator theory for modeling unknown flow fields and guiding robotic active sensing with uncertainty quantification